Ostatnimi czasy postanowiłem zabrać się za stworzenie większego projektu, który będzie bazował na wielu wejściach i wyjściach, będzie komunikował się przez sieć bezprzewodową oraz będzie mógł zostać rozwijany o kolejne moduły.
Wstęp
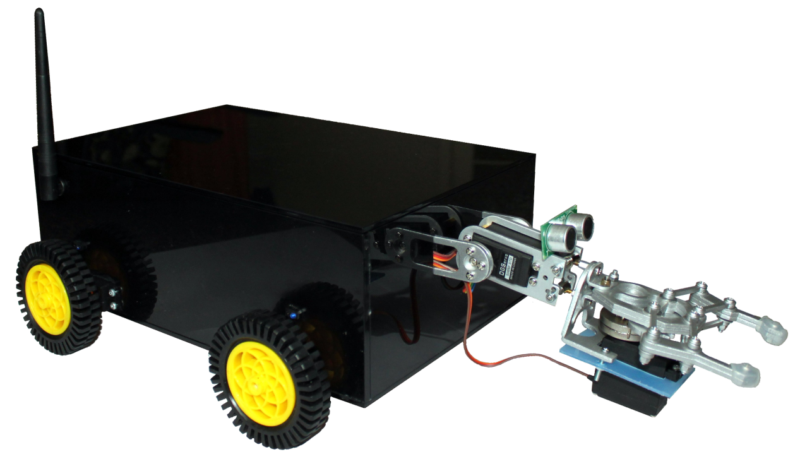
Ostatnimi czasy postanowiłem zabrać się za stworzenie większego projektu, który będzie bazował na wielu wejściach i wyjściach, będzie komunikował się przez sieć bezprzewodową oraz będzie mógł zostać rozwijany o kolejne moduły. Po dokładnej analizie postanowiłem stworzyć bezprzewodową platformę jezdną wyposażoną w chwytak. Głównym celem projektu było opracowanie mikroprocesorowego układu sterowania, którego zadaniem jest zdalne, bezprzewodowe sterowanie małym pojazdem wyposażonym w chwytak do przenoszenia drobnych obiektów.
Korpus platformowy
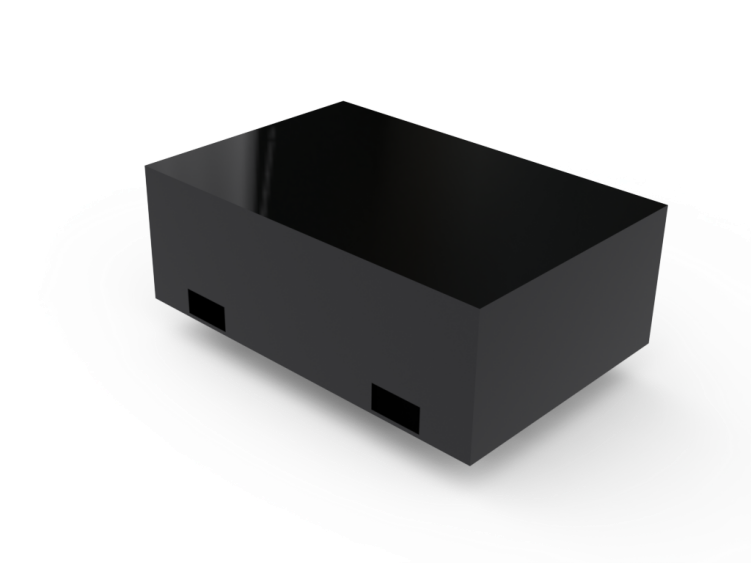
Korpus pojazdu zaprojektowano na kształt prostopadłościanu o wymiarach: długość 30 cm, szerokość 20 cm oraz wysokość 10 cm. Jako materiał konstrukcyjny wykorzystano arkusze czarnej błyszczącej pleksi o grubości 5 mm i 3 mm. Masa całego korpusu wynosi 900 g.
Napęd platformy
Do napędu platformy wykorzystano 4 serwomechanizmy TowerPro MG996R 360°. Zmiana kierunku obrotu jest dokonywana za pomocą zmiany współczynnika wypełniania sygnału PWM. Dla współczynnika wypełniania mieszczącego się w przedziale od 2% do 4% serwomechanizm obraca się w prawo, zaś dla przedziału od 10% do 12% w lewo. Serwomechanizmy mogą być zasilane napięciem z zakresu od 4.8 V do 7.2 V i dysponują momentem napędowym od 0.83 Nm do 1 Nm, który zależy od wartości napięcia zasilającego.

Pomiar kąta obrotu kół
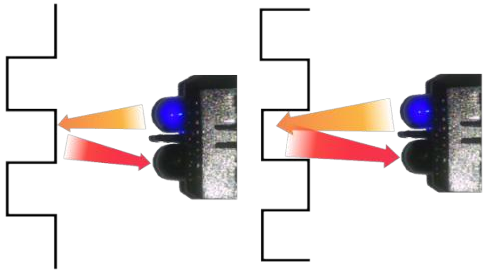
Pomiar kąta obrotu kół zrealizowano za pomocą 4 czujników optycznych TCRT-5000, które umożliwiają pomiar z rozdzielczością 9°. Następnie wartość kąta obrotu kół jest przeliczana na odległość jaką pokonało każde z kół.
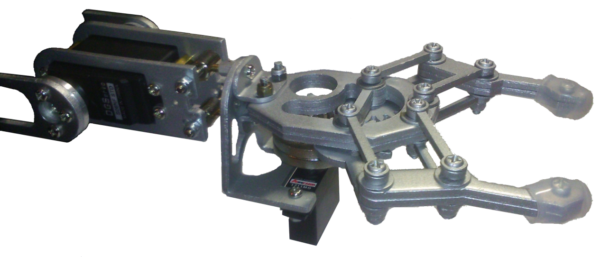
Chwytak
Chwytak platformy stanowi gotowy moduł Robotic Claw MKII wraz z ramieniem Robotic Claw Pan do którego zamontowałem serwomechanizm TowerPro MG995.
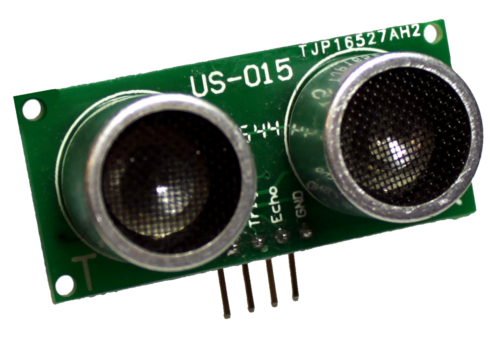
Wykrywanie przeszkód
W celu wykrycia przeszkód znajdujących się na drodze platformy oraz oszacowaniu w jakiej znajdują się odległości od pojazdu wykorzystano czujnik ultradźwiękowy US-015. Umożliwia on pomiar odległości w zakresie od 2 cm do 400 cm z dokładnością 0.3 cm.
Zasilanie
Zasilanie platformy zrealizowano za pomocą dwóch niezależnych źródeł napięcia. Pierwszym jest akumulator żelowy o napięciu znamionowym 6 V, który zasila serwomechanizmy odpowiedzialne za napęd platformy oraz chwytaka. Drugim jest pakiet ogniw Li-Ion, połączonych szeregowo-równolegle, tym samym zapewniając napięcie wyjściowe na poziomie 7.4 V. Napięcie to następnie jest obniżane do wartości 5 V i wykorzystane do zasilenia mikrokontrolera ATmega32A oraz czujników.

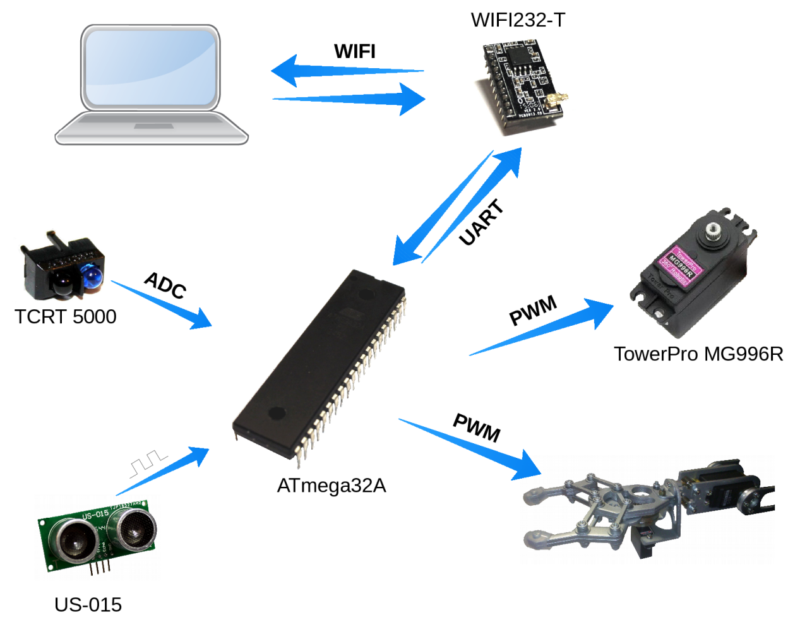
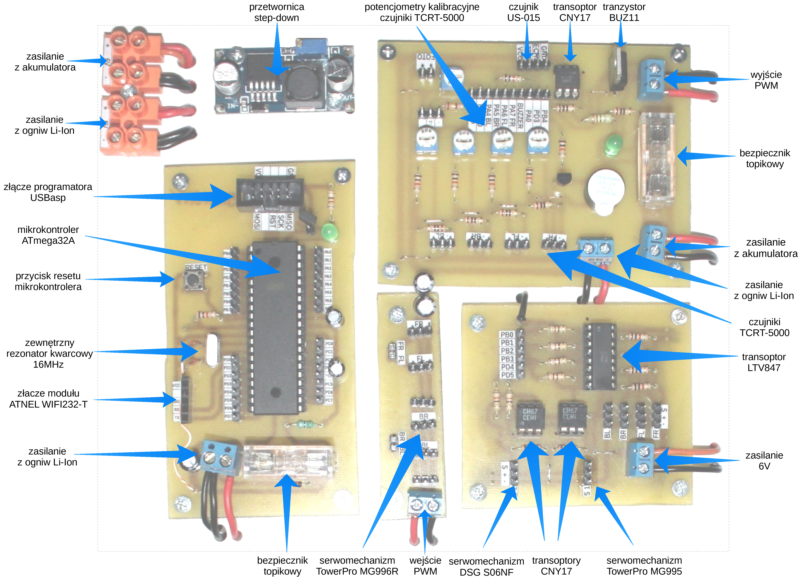
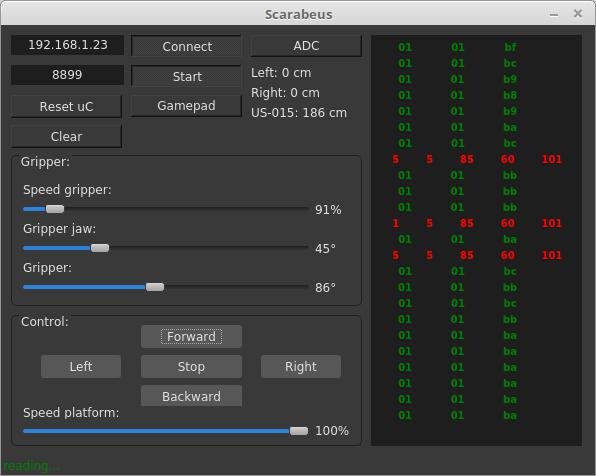
Sterowanie
Główną jednostkę sterującą stanowi mikrokontroler ATmega32A. Jest on odpowiedzialny za generowanie sygnałów sterujących PWM o odpowiednim współczynniku wypełnienia oraz zbieraniu informacji z czujników. Wszystkie sygnały sterujące zostały odseparowane galwanicznie za pomocą transoptorów CNY17 oraz LTV847. Komunikacja bezprzewodowa została zrealizowana za pomocą modułu ATNEL WIFI232-T, który komunikuje się z mikrokontrolerem przy użyciu interfejsu UART. Aplikację komputerową zrealizowano w środowisku Qt Creator wykorzystując język programowania wysokiego poziomu C++ oraz biblioteki Qt.
Zrealizowany projekt jest konstrukcją bazową do dalszego rozwoju. Perspektywa dalszego rozwoju stanowi stworzenie pojazdu autonomicznego. Dalsze prace będą opierały się w dużej mierze na cyfrowej analizie obrazu w czasie rzeczywistym wykorzystując w tym celu biblioteki Open CV oraz zaawansowane algorytmu segmentacji i przetwarzania obrazu. Dalszy rozwój projektu będę starał się w miarę systematycznie zamieszczać na tej stronie. Mogę powiedzieć, że niebawem ukaże się wpis obrazujący sterowanie modułu chwytaka za pomocą gestów dłoni, które są rozpoznawane przez kamerę umieszczoną na przednim panelu laptopa.